Werbung
Ferngesteuerte Autos machen zwar Spaß, aber selbstfahrend Roboterautos machen noch mehr Spaß. In diesem Tutorial bauen wir einen vierrädrigen Roboter, der herumfahren und Hindernissen ausweichen kann. ich kaufte Dieses komplette 4WD-Kit von AliExpressSie können die meisten dieser Komponenten jedoch problemlos in einem Elektronikgeschäft kaufen und selbst zusammenstellen.
Ich empfehle, alle Anweisungen zu lesen, bevor Sie beginnen, da dies einige Dinge klar macht, die beim ersten Durchgang verwirrend sein können. Aufgrund der Länge der Anweisungen mag dies auch wie ein sehr langes, fortgeschrittenes Projekt aussehen, aber es ist eigentlich ziemlich einfach. Sie müssen sich nicht einschüchtern lassen - dies ist ein Projekt für Anfänger, mit dem Sie zufriedenstellende Ergebnisse erzielen und auf dem Sie aufbauen können, wenn Sie mehr erfahren. Mögen Sie diesen Roboterstil nicht? Hier noch etwas mehr Arduino-Roboter 8 Arduino-Roboter, die Sie für weniger als 125 US-Dollar bauen können Der Arduino kann viel, aber wussten Sie, dass er vollwertige Roboter herstellen kann? Auch recht günstig! Weiterlesen Sie könnten stattdessen leicht bauen.
Folgendes haben wir, nachdem wir alles aus der Verpackung genommen haben:

Zu Beginn befestigen wir die Motoren und die H-Brücke (die Karte, die die Motoren mit Strom versorgt) am unteren Teil des Gehäuses. Befestigen Sie zuerst die vier Metallhalterungen (rechteckige, gebohrte Metallblöcke) mit zwei langen Schrauben und zwei Muttern an jedem Motor.

Sie müssen sicherstellen, dass sie richtig angebracht sind. Sehen Sie sich das Bild unten an, um sicherzustellen, dass die Seite des Blocks mit zwei Bohrlöchern nach unten zeigt. Beachten Sie, dass die Kabel an jedem Motor zur Mitte des Gehäuses zeigen.

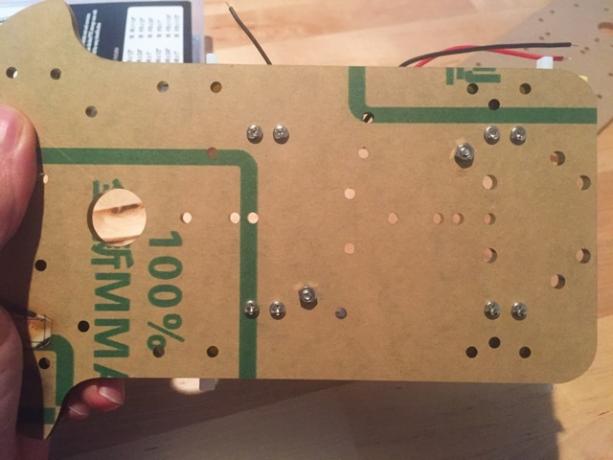
Jetzt kann jeder Motor mit zwei kurzen Schrauben an der Unterseite jeder Metallhalterung am Chassis befestigt werden. Hier ist eine Ansicht der Unterseite des Gehäuses, damit Sie sehen können, wo sich die Schrauben befinden müssen:

Der nächste Schritt besteht darin, die H-Brücke (das ist die rote Tafel in meinem Kit) am Chassis zu befestigen. Vielleicht möchten Sie warten, bis alle Drähte an der H-Brücke befestigt sind, bevor Sie dies tun, aber das liegt bei Ihnen (ich fand es einfacher). Ein kurzer Hinweis: In meinem Kit fehlten einige Befestigungselemente, daher habe ich die Brücke mit Klebeband befestigt. Hier können Sie jedoch sehen, wohin die Schrauben und Muttern gegangen wären:
Nachdem die H-Brücke angebracht wurde, können Sie mit der Verkabelung der Stromversorgung beginnen. Da der 6-AA-Batteriehalter mit einem Gleichstromadapter geliefert wird, müssen Sie entweder das Ende abschneiden (was ich getan habe) oder Überbrückungskabel zu den Batterien selbst verlegen.

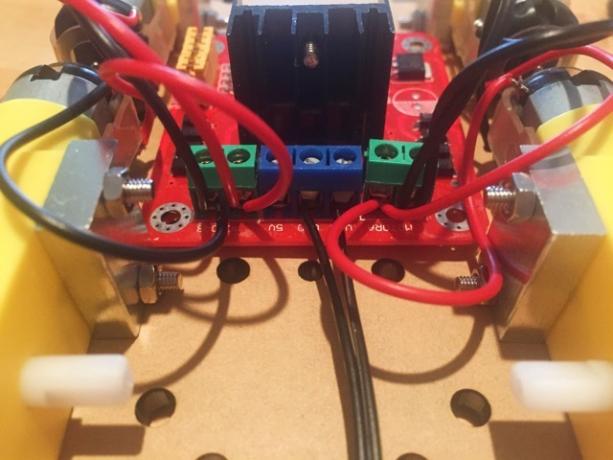
Unabhängig davon, wie Sie sich dazu entschließen, führen Sie das Pluskabel zum Anschluss mit der Bezeichnung "VMS" und den Minuskabel zum Anschluss mit der Bezeichnung "GND" auf der Brücke. Schrauben Sie die Befestigungselemente fest und stellen Sie sicher, dass sie sicher sind. Dann verbinden Sie die Motorkabel. Auf beiden Seiten gibt es zwei Ports. einer ist mit "MOTORA" und der andere mit "MOTORB" gekennzeichnet. Beide Rote Drähte auf jeder Seite führen in den zentralsten grünen Anschluss, und beide schwarzen Drähte führen in den äußersten. Dieses Bild sollte es klarer machen:
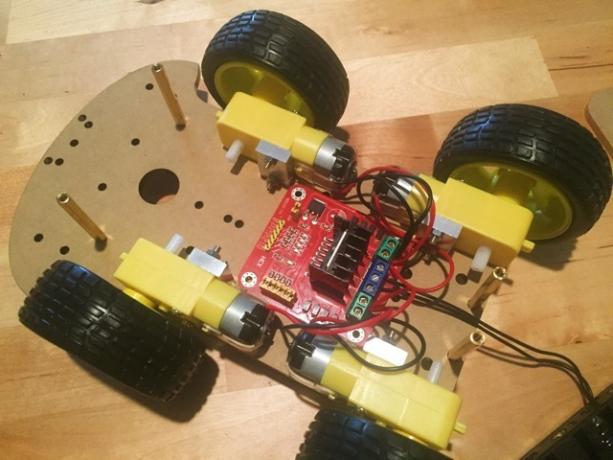
Ich stellte fest, dass ich einen Teil des Gehäuses von den Motorkabeln abziehen musste, damit dies funktioniert. Nachdem Sie alle Motoren und das Netzteil verkabelt haben, schieben Sie die Räder auf die Motorantriebswellen und Befestigen Sie die vier Kupferwellen an den in der Abbildung unten gezeigten Stellen (jede Kupferwelle benötigt eine kleine Schraube). Dieser Roboter nimmt Gestalt an!
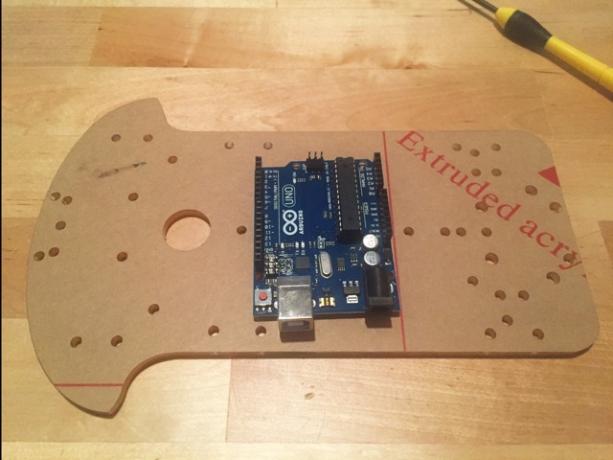
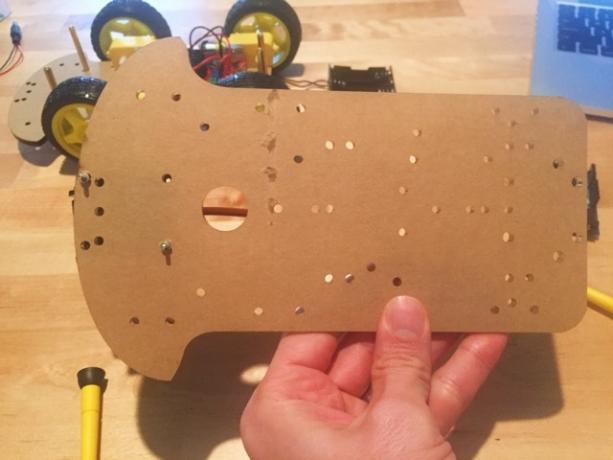
Legen Sie nun diesen Teil des Gehäuses beiseite und greifen Sie nach dem anderen, der oben sitzt. Der nächste Schritt ist das Anbringen des Arduino - wieder musste ich Klebeband verwenden, aber Sie sollten in der Lage sein, Ihr Arduino mit einigen Schrauben und Muttern besser zu sichern.
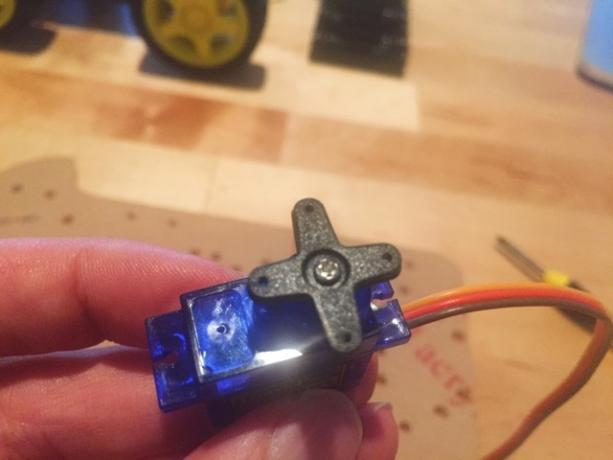
Der nächste Schritt erfordert das Mikroservo, das schwarze Kreuzstück, den Servohalter (der aus drei schwarzen Kunststoffteilen besteht) und einige kleine Schrauben. Verwenden Sie eine der größeren scharfen Schrauben im Kit, um das schwarze Kreuzstück am Mikroservo zu befestigen:
Drehen Sie dann das Servo verkehrt herum in den schwarzen Kunststoffring des Halters. Stellen Sie sicher, dass die aus dem Servo kommenden Drähte in die gleiche Richtung weisen wie der längere Teil des Halters (siehe auch hier) Bild unten) und befestigen Sie die Querstange mit vier winzigen Schrauben (im Halter befinden sich vier Löcher, die mit den Löchern auf der Halterung übereinstimmen Querlatte).

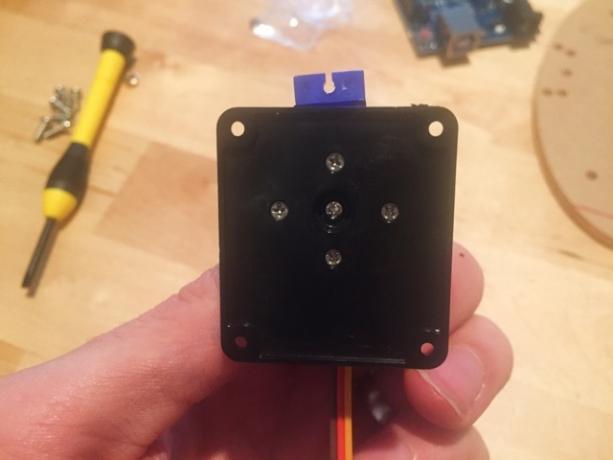
So sieht es aus, nachdem es angehängt wurde:
Nehmen Sie zum Schluss die beiden anderen Teile des Servohalters und schnappen Sie sie auf das Servo (in den Seitenteilen befinden sich Rillen, die mit der Plastiklasche am Servo übereinstimmen).

Nachdem der Servohalter fertig ist, kann er am Chassis montiert werden.

Hier sind die Schrauben:
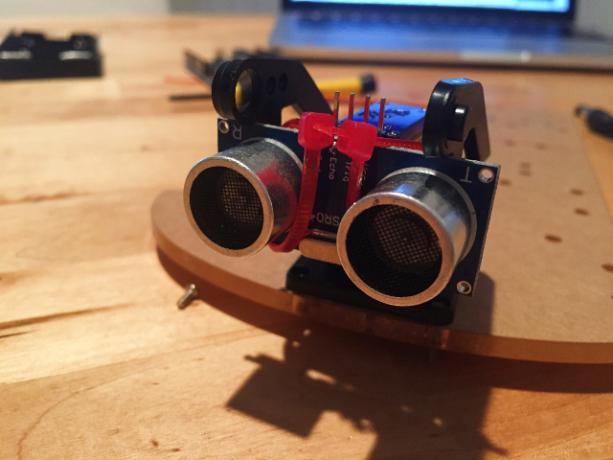
Es ist Zeit, unserem Roboter ein paar Augen zu geben. Befestigen Sie den Ultraschallsensor mit zwei Kabelbindern am Servohalter.
Wenn Sie mit demselben Kit arbeiten wie ich, haben Sie ein Arduino-Sensorschild erhalten. Wir werden es in diesem Build nicht verwenden, aber Sie können es jetzt oben auf der UNO platzieren, wenn Sie möchten (wie im Bild unten). Richten Sie einfach die Stifte an der Unterseite der Abschirmung an den E / A-Anschlüssen des Arduino aus und drücken Sie sie nach unten, um sie anzuschließen. Du brauchst es im Moment nicht, aber Schilde können nützlich sein Die Top 4 Arduino Shields, um Ihre Projekte zu verbessernSie haben ein Arduino-Starter-Kit gekauft, alle grundlegenden Anleitungen befolgt, aber jetzt sind Sie auf einen Stolperstein gestoßen - Sie benötigen mehr Kleinigkeiten, um Ihren Elektronik-Traum zu verwirklichen. Zum Glück, wenn Sie ... Weiterlesen .

Unabhängig davon, ob Sie eine Sensorabschirmung anschließen oder nicht, benötigen Sie jetzt vier Drähte, um den Ultraschallsensor mit dem Arduino zu verbinden. Der Sensor verfügt über vier Pins: VCC, GND, TRIG und ECHO. Verbinden Sie VCC mit dem 5-V-Pin am Arduino, GND mit GND und TRIG und ECHO mit den E / A-Pins 12 und 13.
Greifen Sie nun nach dem unteren Teil des Gehäuses und verbinden Sie sechs Überbrückungskabel mit den E / A-Pins der H-Brücke (sie sind mit ENA, IN1, IN2, IN3, IN4 und ENB gekennzeichnet). Notieren Sie sich, welche Farbdrähte an welche Anschlüsse angeschlossen sind, wie Sie später wissen müssen.

Jetzt ist es Zeit, dieses Ding zusammenzustellen. Nehmen Sie den oberen Teil des Gehäuses, setzen Sie ihn auf die mit dem unteren Teil verbundenen Kupferwellen und ziehen Sie die an der H-Brücke befestigten Drähte durch das Loch in der Mitte des Gehäuses. Schließen Sie die sechs Drähte wie folgt an die E / A-Anschlüsse an:
- ENA an E / A-Port 11
- ENB an E / A-Port 10
- A1 zu E / A-Port 5
- A2 an E / A-Port 6
- B1 an E / A-Port 4
- B2 zu E / A-Port 3

Befestigen Sie nun den oberen Teil des Gehäuses mit vier kurzen Schrauben an den Kupferwellen. Setzen Sie den 6-AA-Batteriehalter oben auf das Gehäuse (schrauben Sie ihn fest, wenn Sie können), befestigen Sie den 9-V-Zellenhalter am Arduino, und dieser Bot ist bereit zum Schaukeln!

Na ja, fast bereit zu rocken. Es hat noch nicht genug Persönlichkeit.
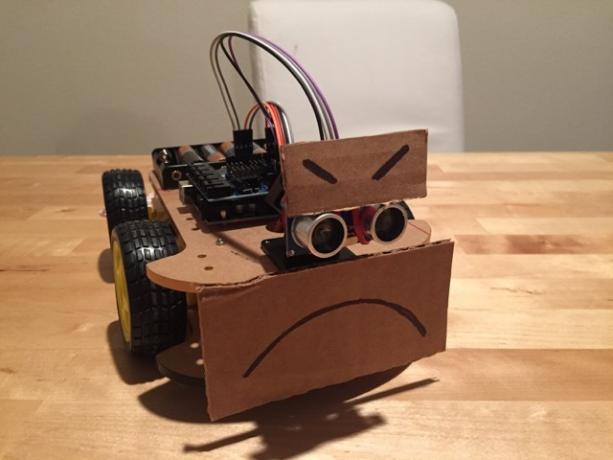
Na, bitte. Nun, um ihm ein Gehirn zu geben. Lassen Sie uns etwas programmieren.
Als erstes testen wir, ob die Brücke und die Motoren richtig angeschlossen sind. Hier ist eine kurze Skizze Das sagt dem Bot, er soll eine halbe Sekunde vorwärts fahren, eine halbe Sekunde rückwärts fahren und dann nach links und rechts abbiegen:
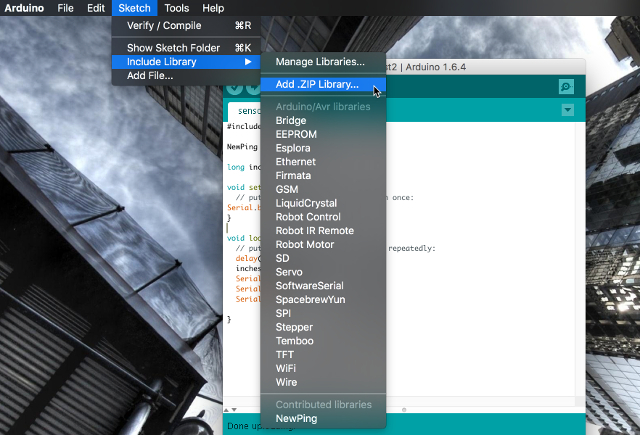
Das ist viel Code für einen einfachen Test, aber das Definieren all dieser Funktionen erleichtert das spätere Optimieren. (Vielen Dank an Billwaa für seine Blogbeitrag zur Verwendung der H-Brücke zur Definition dieser Funktionen.) Wenn ein Fehler aufgetreten ist, überprüfen Sie alle Verbindungen und stellen Sie sicher, dass die Drähte mit den richtigen Pins verbunden sind. Wenn alles funktioniert hat, ist es Zeit, mit dem Sensortest fortzufahren. Um den Ultraschallsensor zu verwenden, benötigen Sie Laden Sie die NewPing-Bibliothek herunterund dann verwenden Skizze> Bibliothek einschließen> .ZIP-Bibliothek hinzufügen… um die Bibliothek zu laden.
Stellen Sie sicher, dass die include-Anweisung oben in Ihrer Skizze angezeigt wird. Wenn Sie dies nicht tun, drücken Sie Skizze> Bibliothek einschließen> NewPing. Laden Sie anschließend die folgende Skizze hoch:
Laden Sie die Skizze hoch und öffnen Sie den seriellen Monitor mit Extras> Serieller Monitor. Sie sollten eine schnell aktualisierte Folge von Zahlen sehen. Halten Sie Ihre Hand vor den Sensor und prüfen Sie, ob sich diese Zahl ändert. Bewegen Sie Ihre Hand hinein und heraus, und Sie sollten messen, wie weit Ihre Hand vom Sensor entfernt ist.

Wenn alles richtig funktioniert hat, ist es Zeit, alles zusammenzusetzen und das Ding laufen zu lassen! Hier ist der Code für den Roboter jetzt. Wie Sie wahrscheinlich sehen können, handelt es sich im Grunde genommen um die beiden Testskizzen, die zusammen mit einer zusätzlichen if-Anweisung zur Steuerung des Roboterverhaltens zusammengestellt wurden. Wir haben ihm ein sehr einfaches Hindernisvermeidungsverhalten gegeben: Wenn es etwas erkennt, das weniger als fünf Zentimeter entfernt ist, wird es gesichert, biegt nach links ab und beginnt sich wieder zu bewegen. Hier ist ein Video des Bots in Aktion.
Geben Sie Ihrem Roboter etwas Leben
Sobald dieses Verhalten ordnungsgemäß funktioniert hat, können Sie komplexeres Verhalten hinzufügen. Lassen Sie den Roboter abwechselnd nach links und rechts drehen oder wählen Sie nach dem Zufallsprinzip. ertönt ein Summer, wenn er sich etwas nähert; einfach drehen, anstatt zu sichern; Sie sind wirklich nur durch Ihre Vorstellungskraft eingeschränkt. Sie könnten fast alles in Ihrem verwenden Arduino Starter Kit Was ist in Ihrem Arduino Starter Kit enthalten? [Arduino Anfänger]Angesichts einer Box voller elektronischer Komponenten ist es leicht, überwältigt zu werden. Hier finden Sie eine Anleitung zu genau dem, was Sie in Ihrem Kit finden. Weiterlesen um mehr Funktionalität hinzuzufügen. Sie werden auch feststellen, dass wir noch nichts für das Servo codiert haben: Sie können die "Augen" Ihres Roboters tatsächlich hin und her bewegen. Vielleicht verwenden Sie sie, um einen Weg zu suchen, anstatt nur einen Rückzieher zu machen, wenn ein Hindernis direkt vor Ihnen gefunden wird.
Lassen Sie uns wissen, ob Sie diesen oder einen anderen Roboter bauen möchten, und teilen Sie uns mit, wie Sie sein Verhalten oder Aussehen anpassen möchten. Wenn Sie Fragen zu diesem Roboter haben, posten Sie diese in den Kommentaren unten und ich werde sehen, ob ich Ihnen helfen kann!
Dann ist ein Content-Strategie- und Marketingberater, der Unternehmen dabei hilft, Nachfrage und Leads zu generieren. Er bloggt auch über Strategie- und Content-Marketing auf dannalbright.com.


